Praxinoscope: Physical Computing Project 3

For this third project in Physical Computing, I took into account
feedback from classmates regarding my Zoetrope and made several adjustments,
not the least of which was converting it into a Praxinoscope. Check out
the video below to see it's development!
In addition to converting the Zoetrope into a Praxinoscope, I also played with
the idea of creating a simple animatronic by controlling a servo's position
with a potentiometer.
Sadly, I needed to abandon that pursuit in order to successfully complete my original task. Nevertheless, I'll show the progress made and share the wiring schematic for potential future development.
 |
 |
 |
 |
I also experimented with using sound as the driver for the servo. The code is below for future use.
 |
|
Zoetrope Feedback
- Visibility of the animation is obstructed by the zoetrope's shutters and should be improved
-
Pressing the button was uncomfortable. Add a toggle/ click switch
- The base and support can use aesthetic improvements
Praxinoscope Adjustments
- Improve visibility by removing the shutters and using mirrors to capture the persistence of vision.
- Note: the number of mirrors should correspond 1:1 with the number of "frames" in the animation.
- In my case, there are 12 frames, and 12 mirrors, each center aligned to capture the image as clearly as possible.
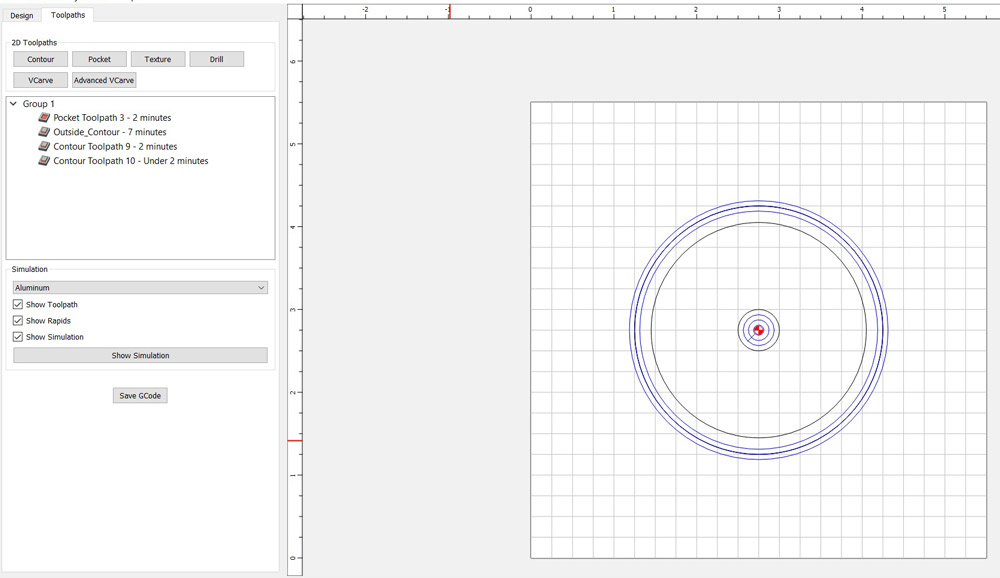
- Design a base in Carbide Create and precisely cut wood material using a CNC machine.
- Swap the push button with a toggle switch.
Development
 |
 |
 |
 |
 |
 |
 |
 |
I wanted something ornate for the base and designed the shape in maya, but the rule of occam's razor is always in effect, and a much simpler outcome was used instead.
 |
 |
 |
 |
 |
 |
 |
 |